王纪龙 | Jilong(Jaylon) Wang

I am a researcher at Peking University - GALBOT Joint Lab, directed by He Wang and Li Yi. I received my B.S. from UC Santa Cruz in 2023. I have previously interned at BAAI, SenseTime, Westlake University, and Tsinghua University, and have also participated in exchange programs at UC Berkeley and Shanghai Jiao Tong University.
Currently, my research focuses on combining Reinforcement Learning (RL)—a reward-driven trial-and-error learning approach—with Model Predictive Control (MPC)—a model-based real-time optimization method—to develop more robust and efficient control systems. Feel free to reach out if you’re interested in my work!
Publications
 GAMMA: Graspability-Aware Mobile MAnipulation Policy Learning based on Online Grasping Pose FusionICRA 2024
GAMMA: Graspability-Aware Mobile MAnipulation Policy Learning based on Online Grasping Pose FusionICRA 2024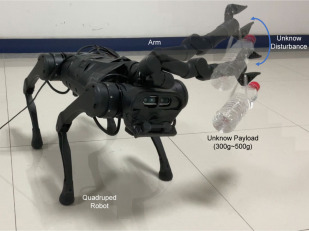 Adaptive legged manipulation: Versatile disturbance predictive control for quadruped robots with robotic armsRobotics and Autonomous Systems
Adaptive legged manipulation: Versatile disturbance predictive control for quadruped robots with robotic armsRobotics and Autonomous Systems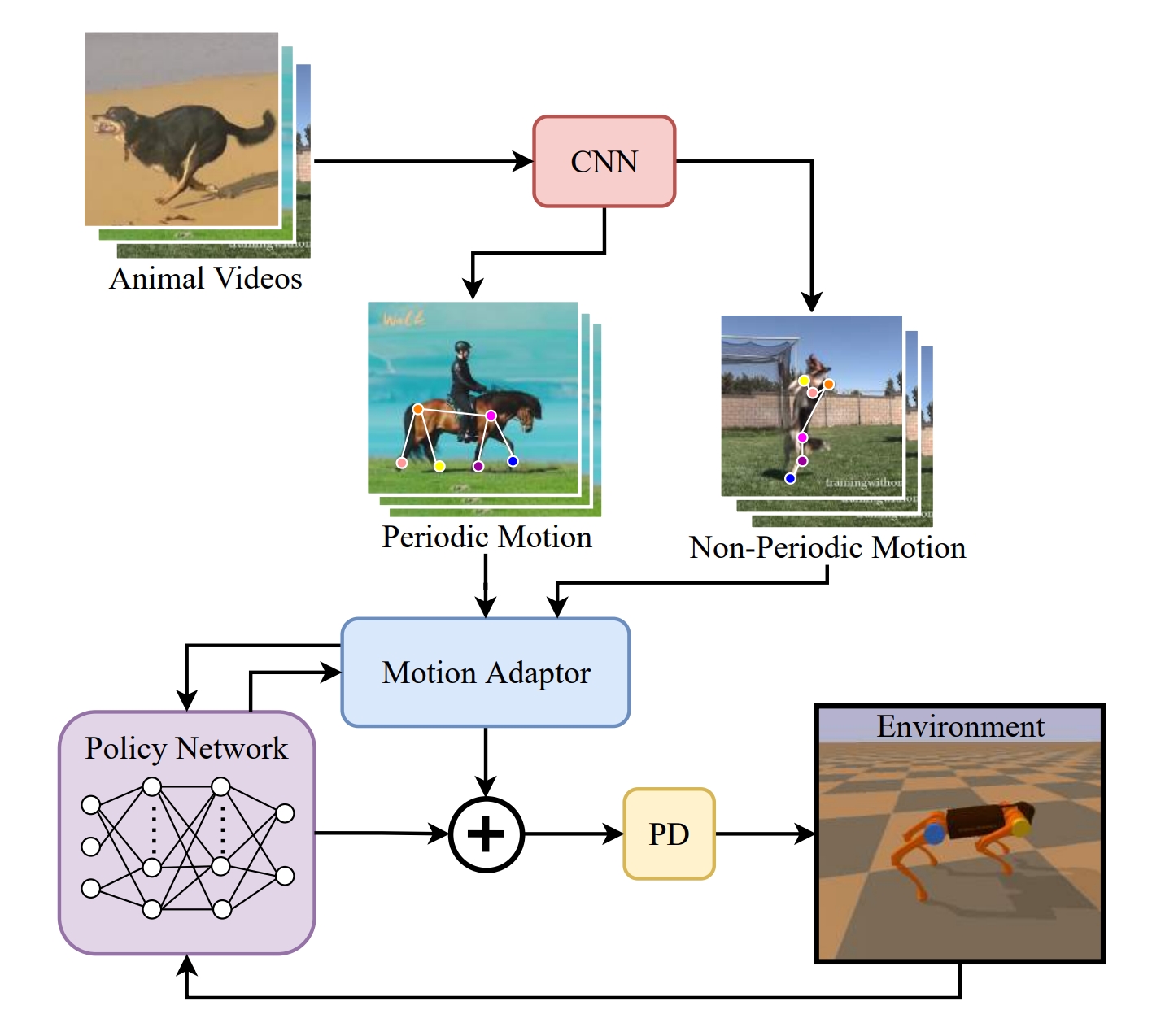 Imitation and adaptation based on consistency: A quadruped robot imitates animals from videos using deep reinforcement learning2022 IEEE International Conference on Robotics and Biomimetics (ROBIO)
Imitation and adaptation based on consistency: A quadruped robot imitates animals from videos using deep reinforcement learning2022 IEEE International Conference on Robotics and Biomimetics (ROBIO)
 Terrain-Aware Risk-Assessment-Network-Aided Deep Reinforcement Learning for Quadrupedal Locomotion in Tough TerrainIROS 2021
Terrain-Aware Risk-Assessment-Network-Aided Deep Reinforcement Learning for Quadrupedal Locomotion in Tough TerrainIROS 2021 Hierarchical terrain-aware control for quadrupedal locomotion by combining deep reinforcement learning and optimal controlIROS 2021
Hierarchical terrain-aware control for quadrupedal locomotion by combining deep reinforcement learning and optimal controlIROS 2021







